University - 3D Scanning
Scanning of 3D objects & environments, as well as motion capture.
- University
- Photogrammetry
- C++
About this project
This page shows results from a course a University that is particularly interesting to game development as it has a lot of overlap with modern photogrammetry.
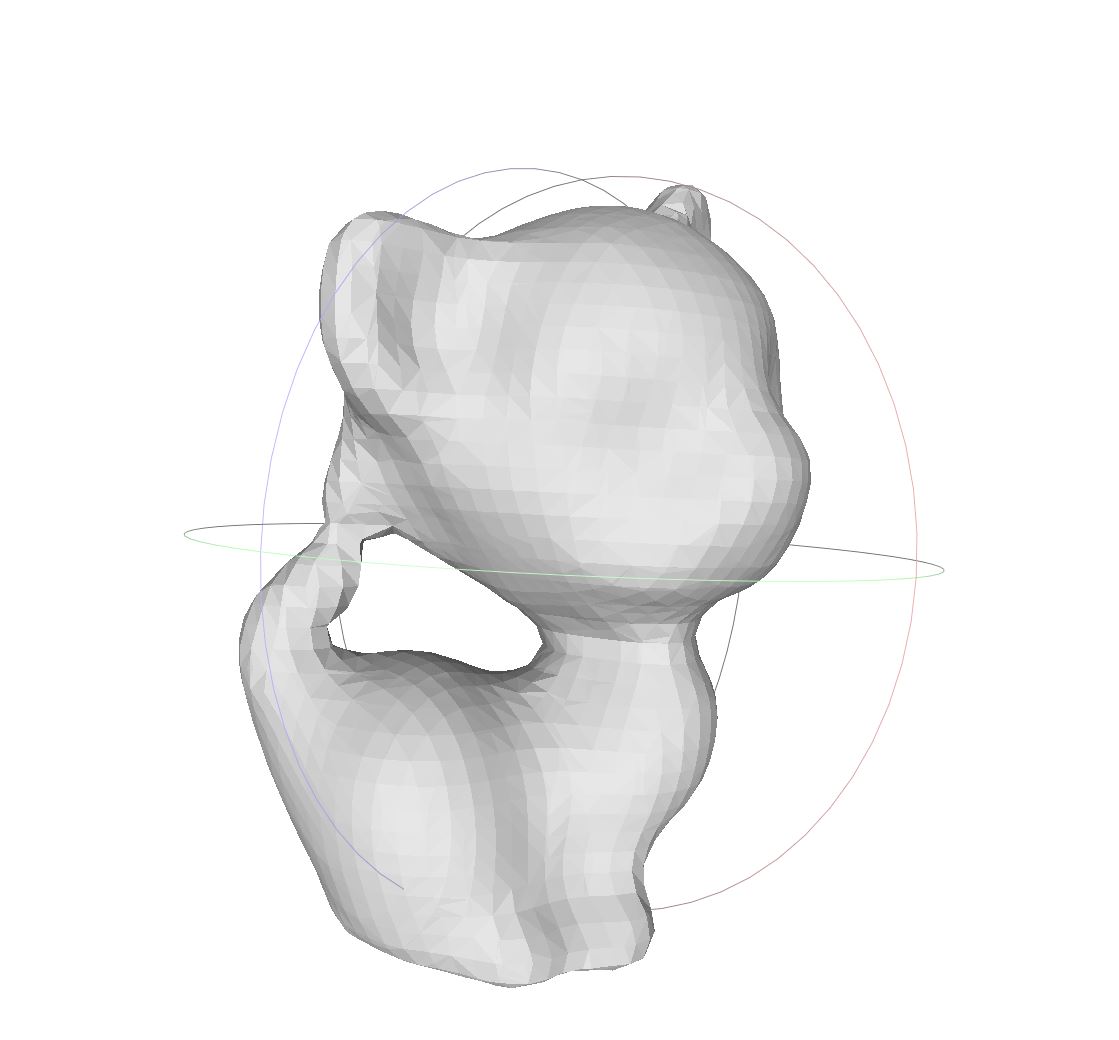
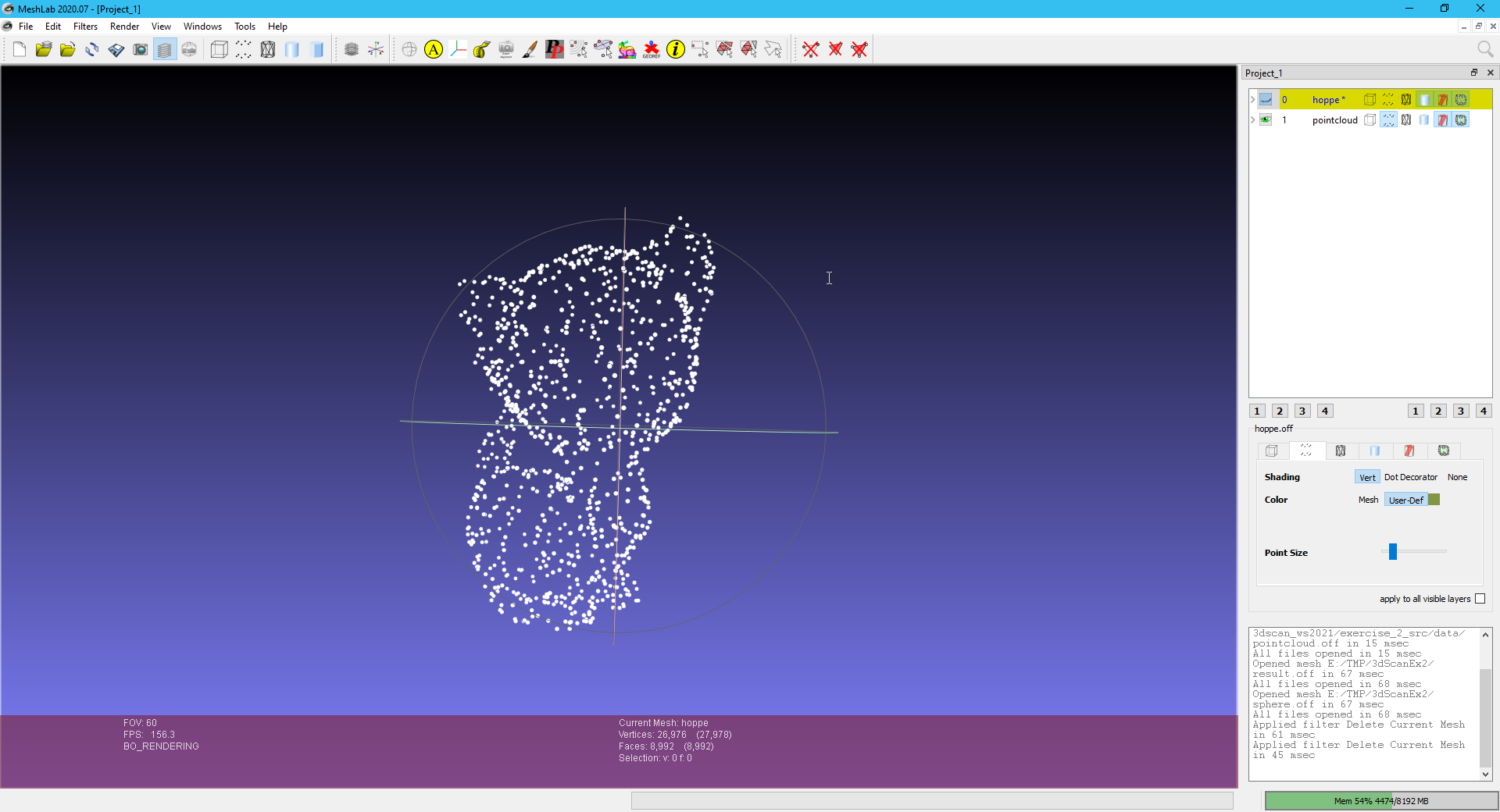
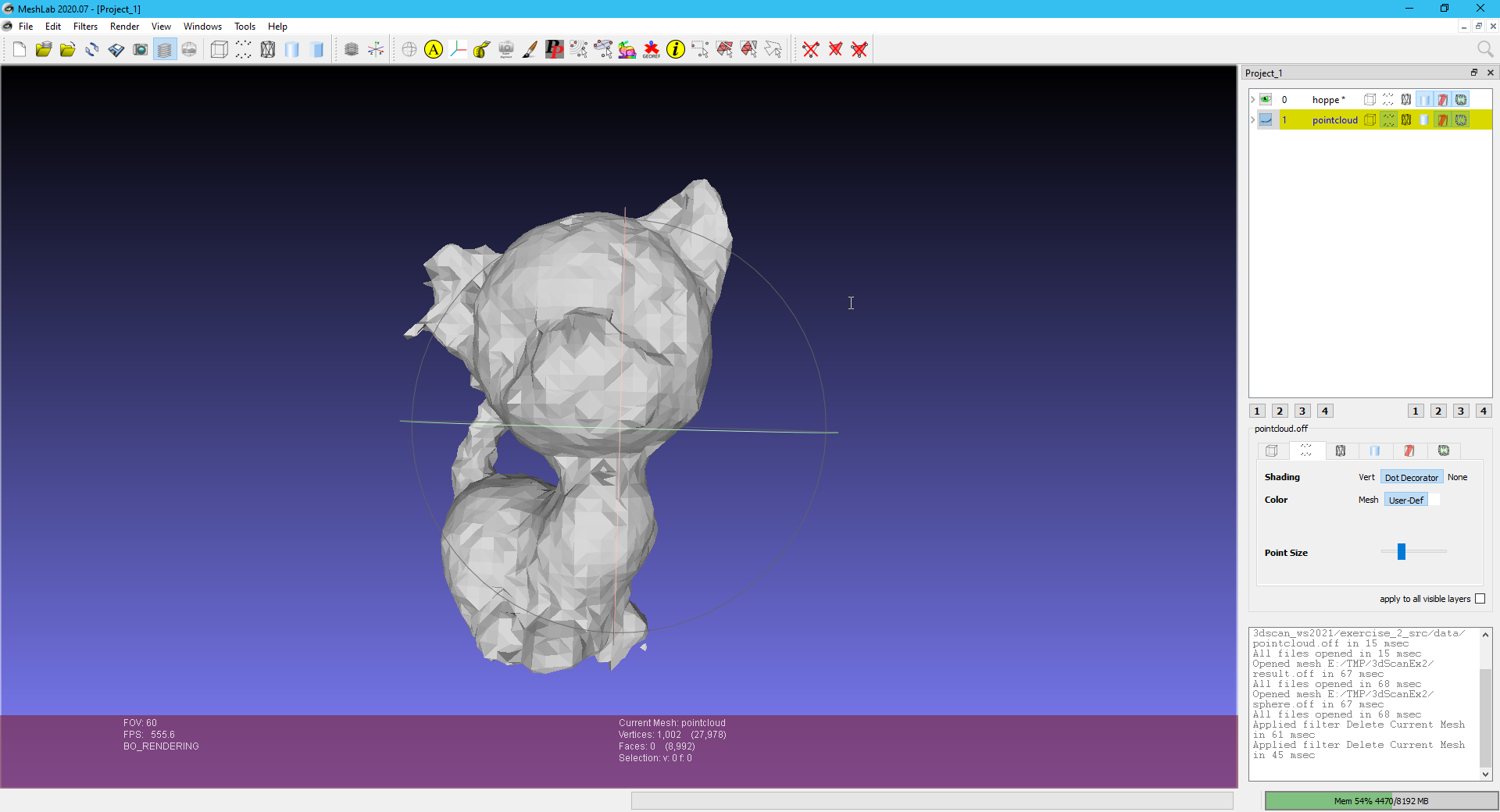
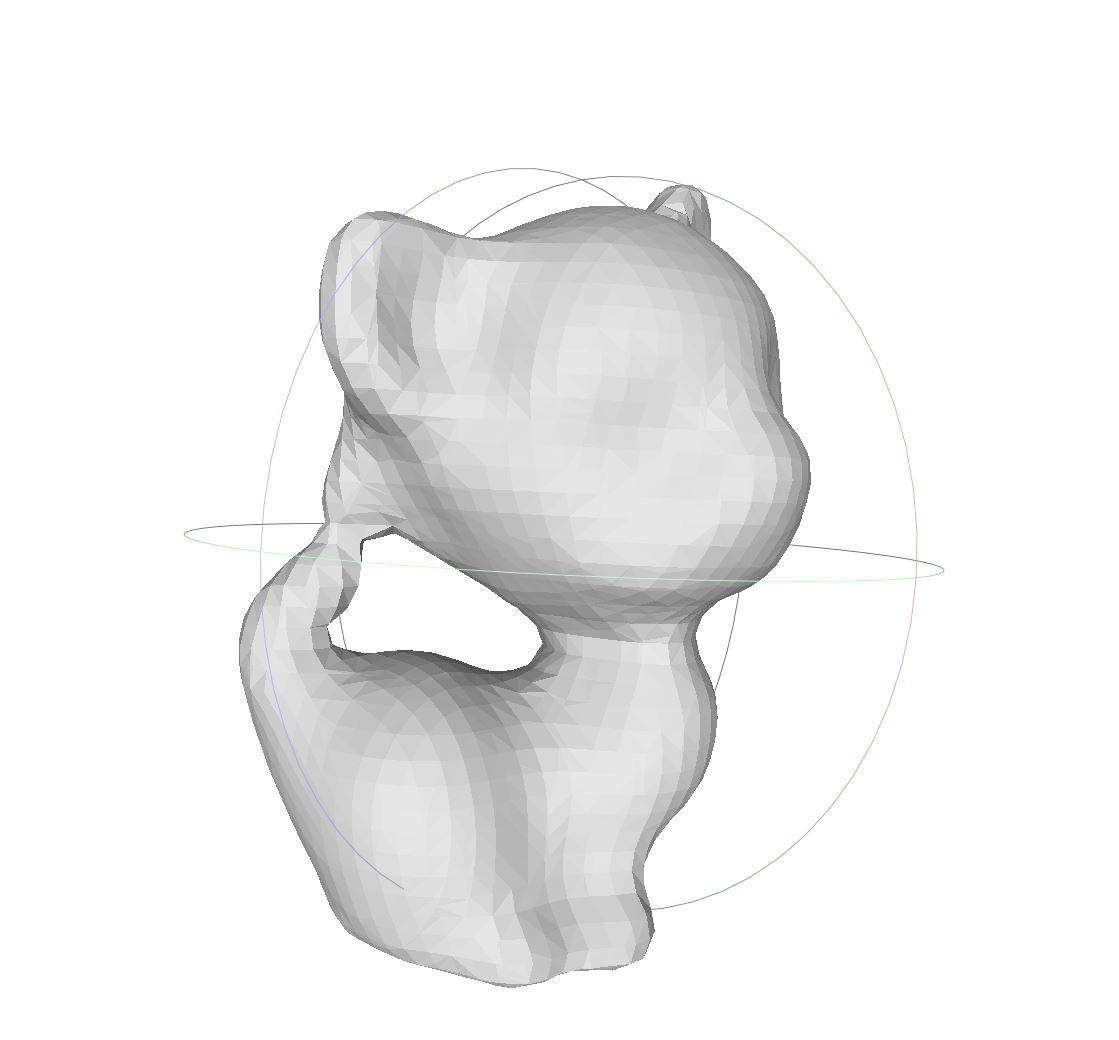
Implicit Surfaces
Hoppe's method, as well as radial basis functions are used to generate a surface representation of a point cloud.
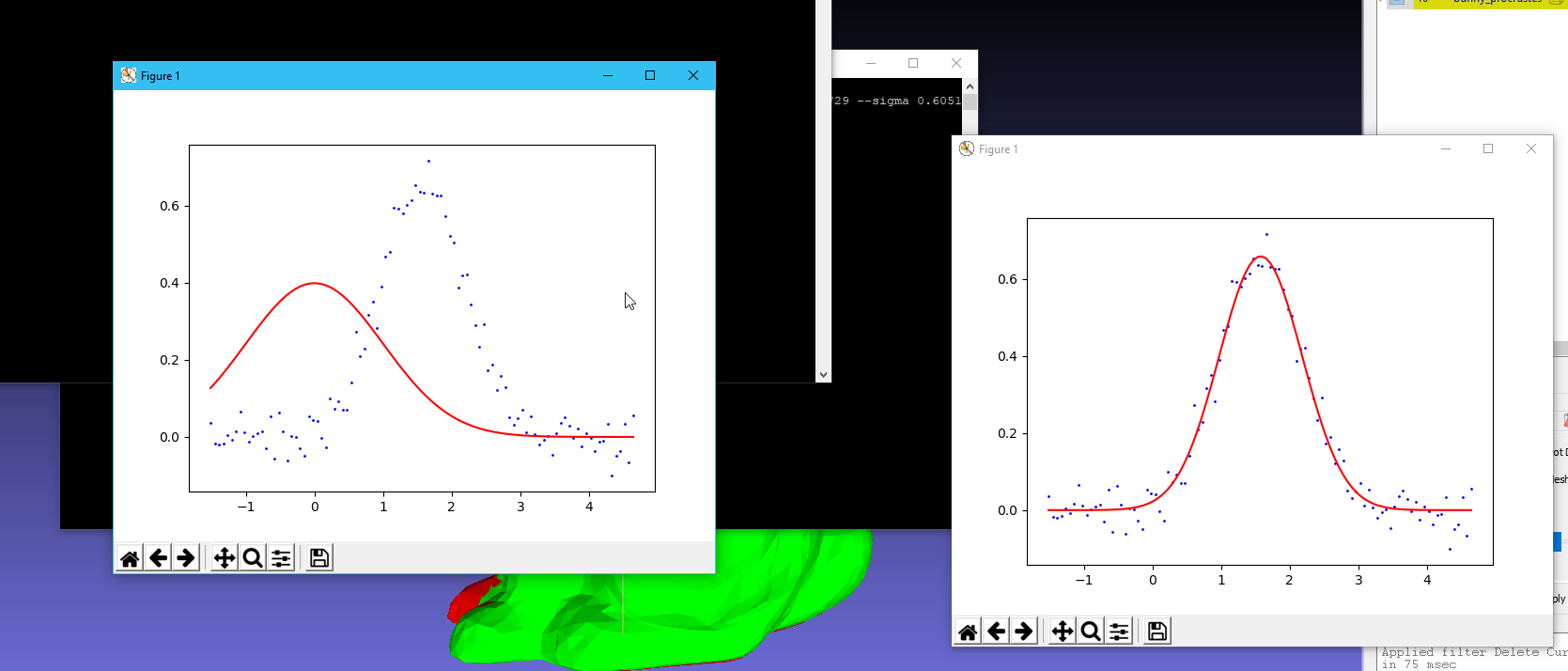
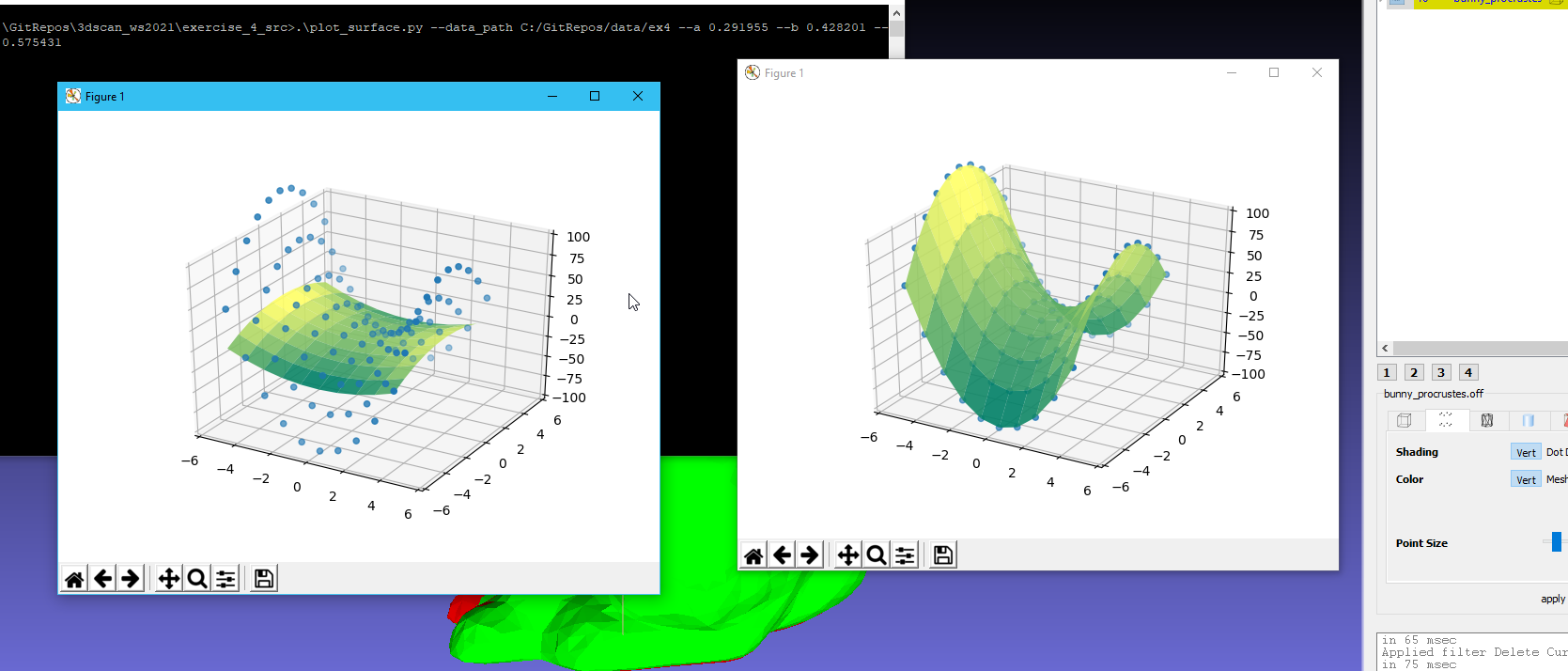
Optimization Problems
The aim of those different excercises was to find the parameters for fitting a function to a set of points. This was done on gaussian curves, a paraboloid and on marker-based registration.
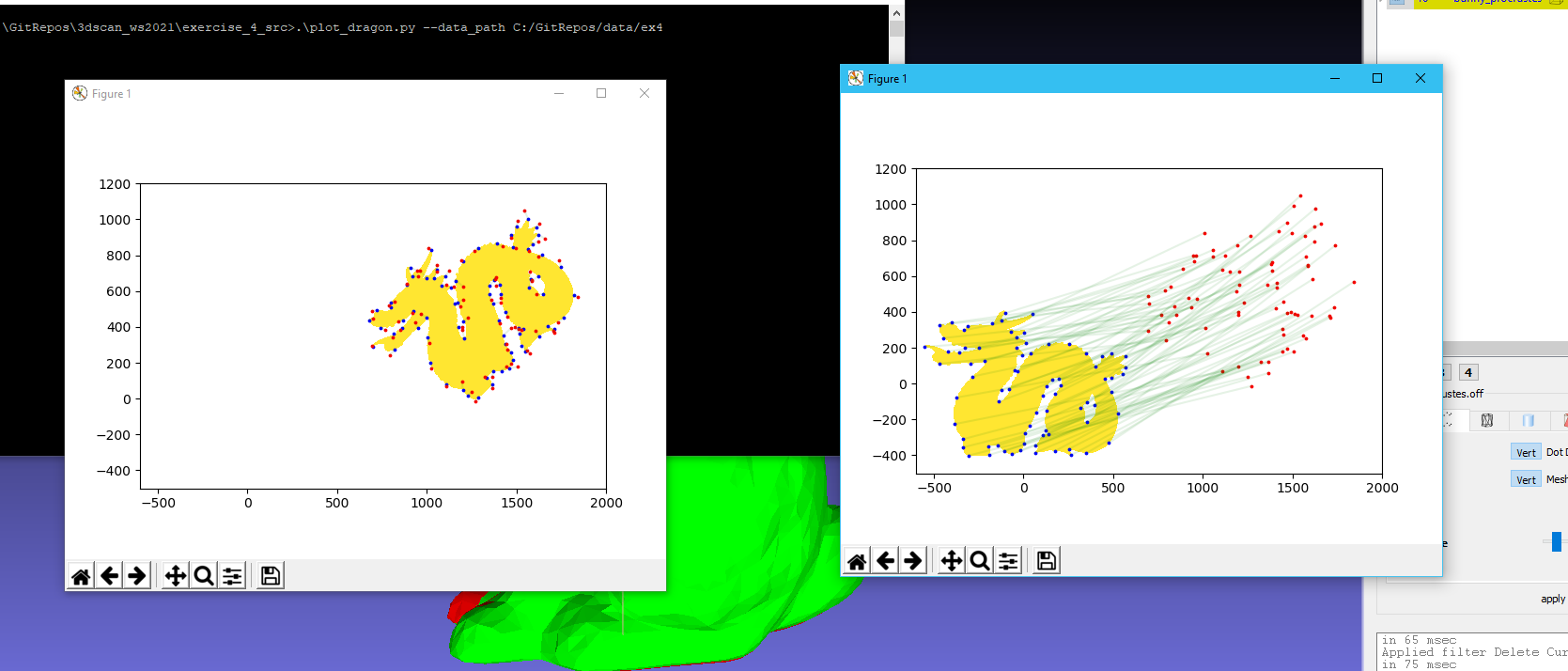
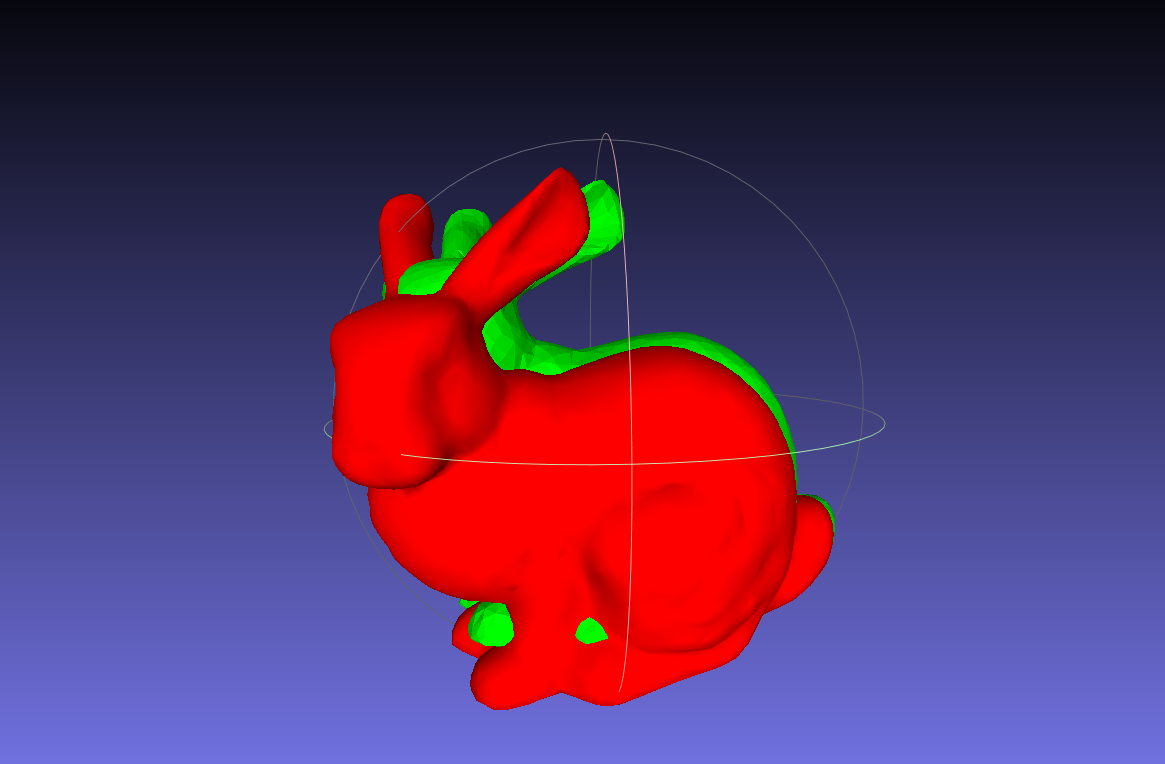
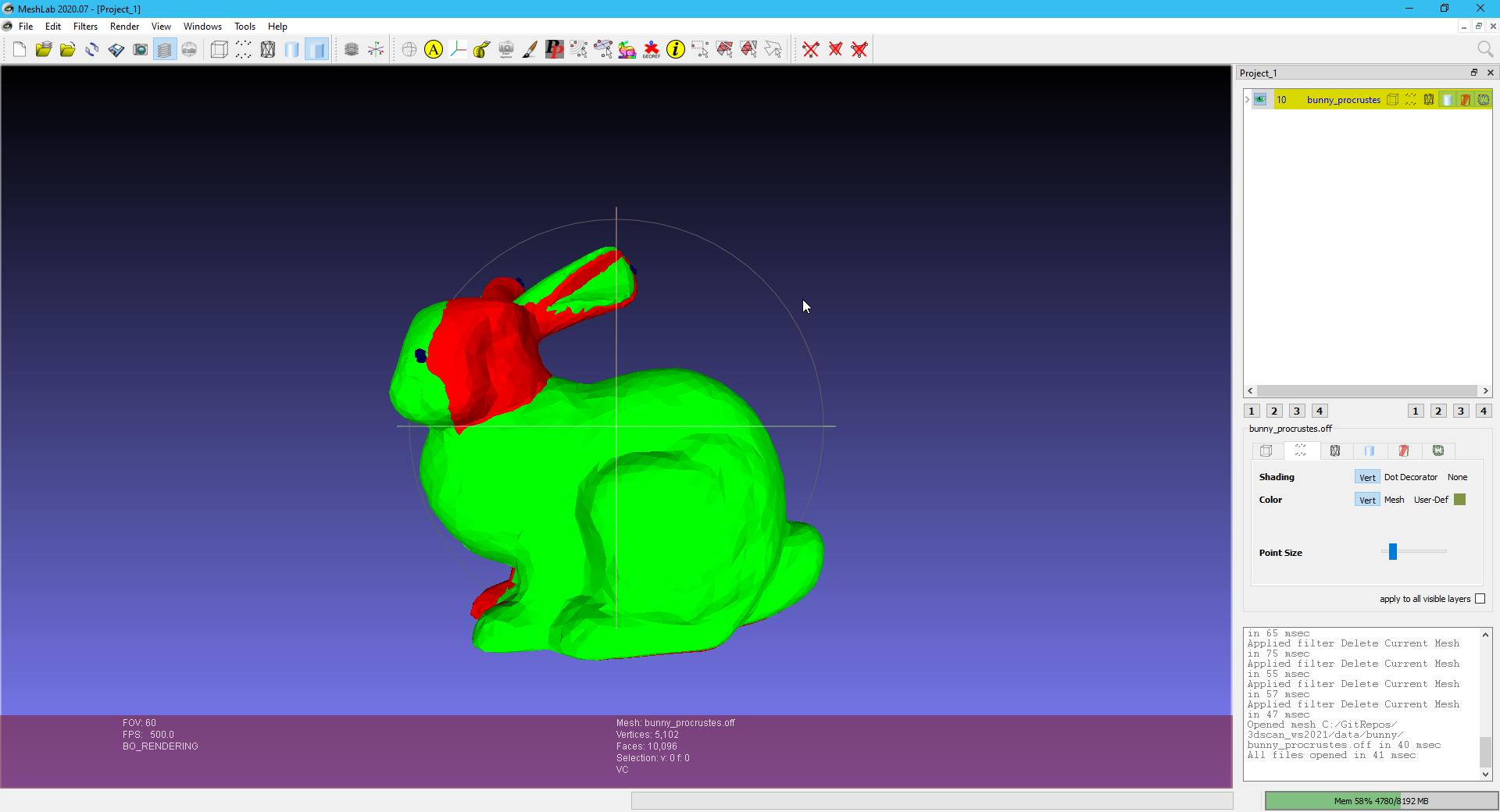
Coarse Alignment
Procrustes algorithm was used to allign multiple instances of the same mesh by using a sparse point correspondence.
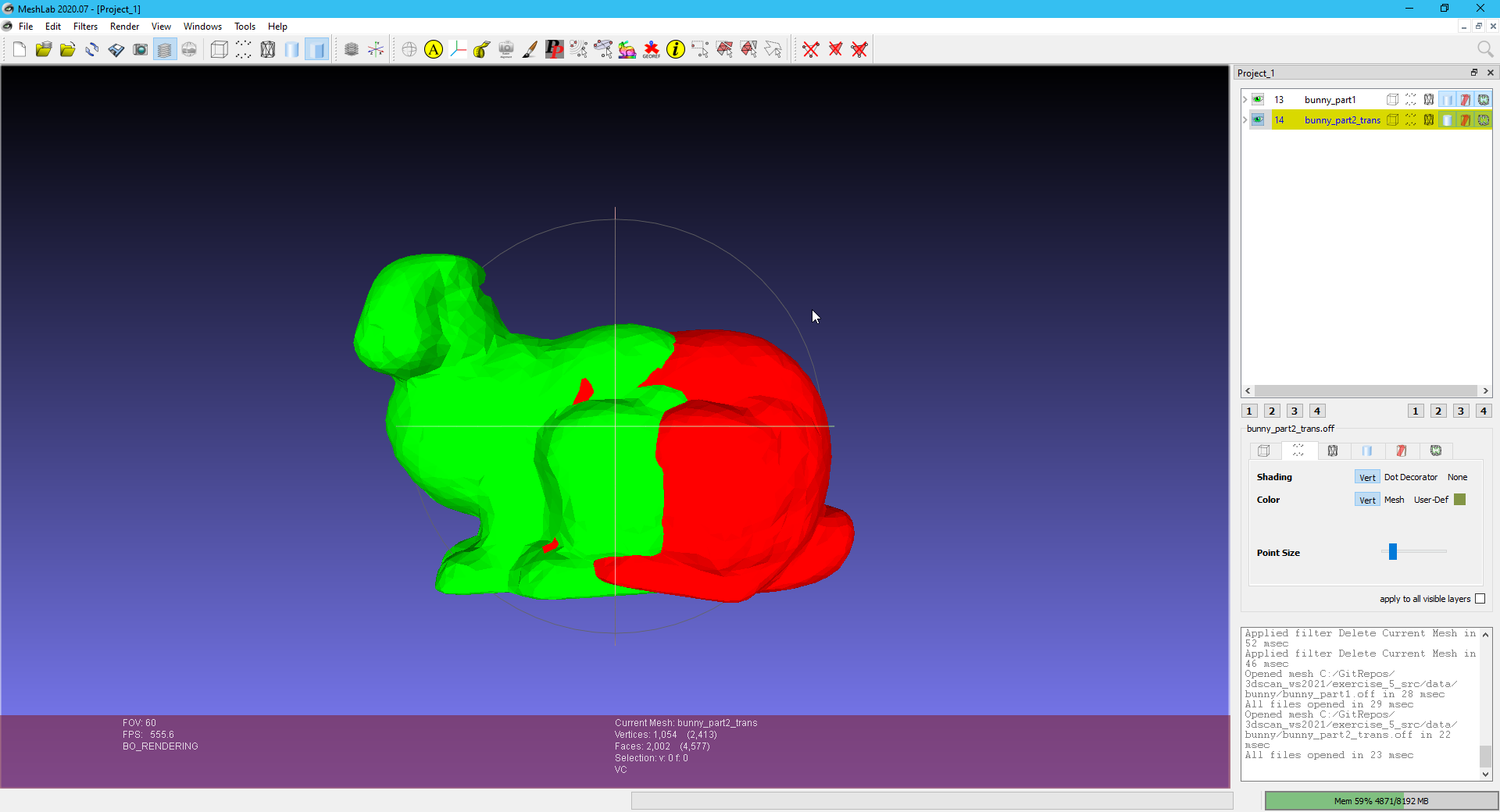
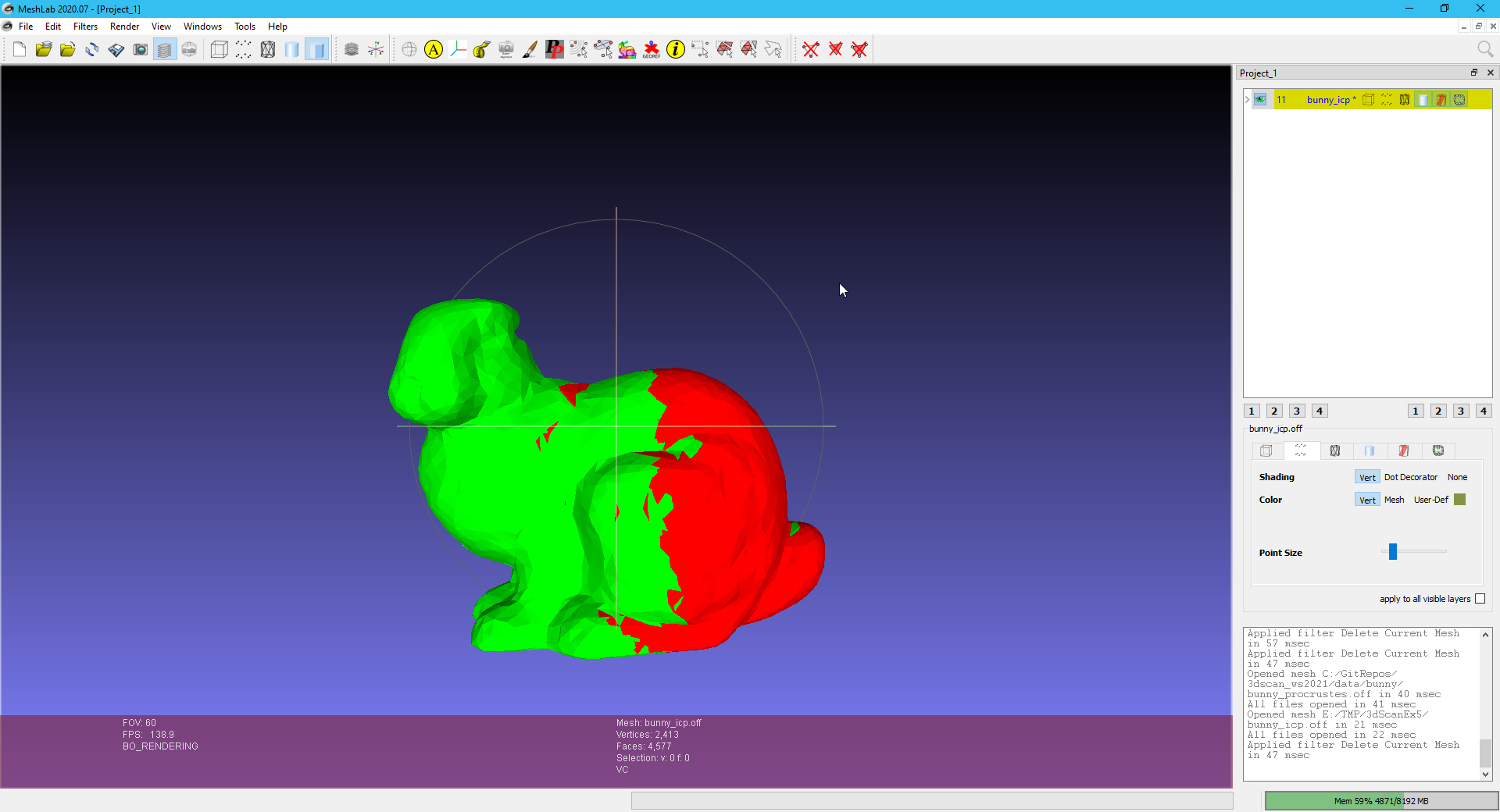
ICP
The itertative closest points (ICP) algorithm was used to allign partial meshes.
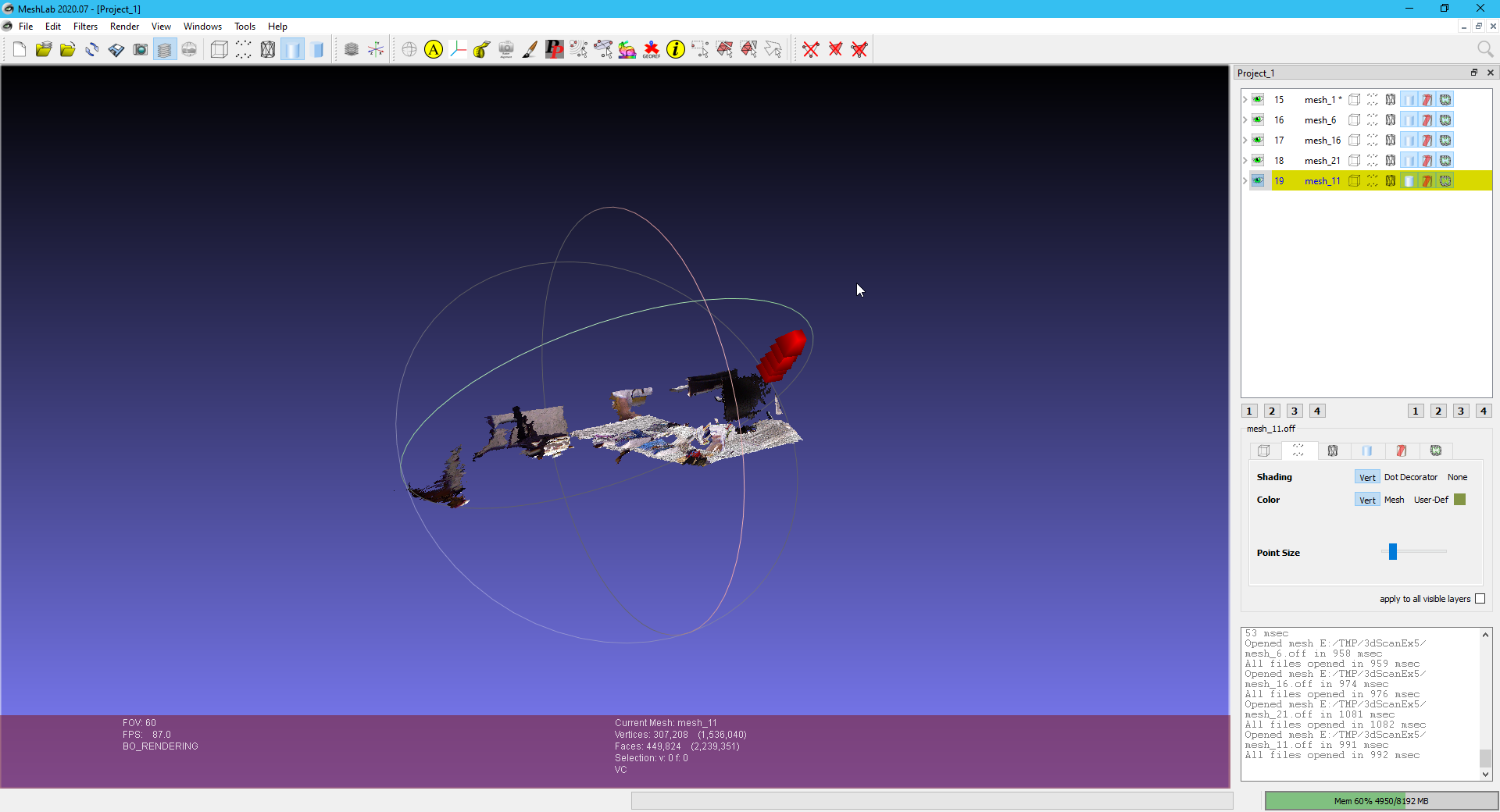
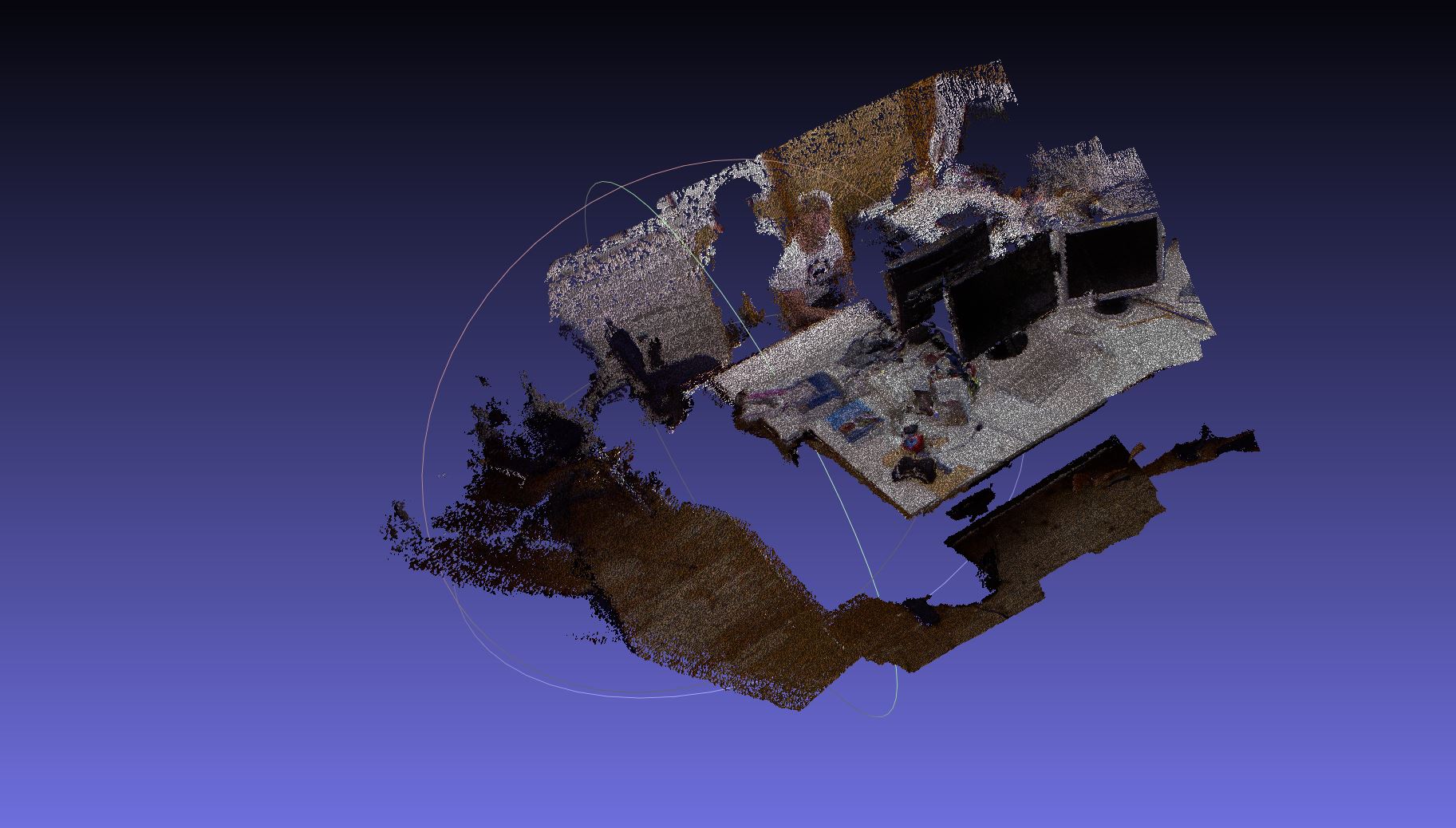
Camera Intrinsics, Back-projection, Meshes
This image shows the result of a data reconstruction from an RGBD sensor.
Camera Tracking
The itertative closest points (ICP) algorithm was used to track a camera over multiple frames.